Product Code: LBNY-0005-1300004
Categories: General Mechanics Instruments Lab
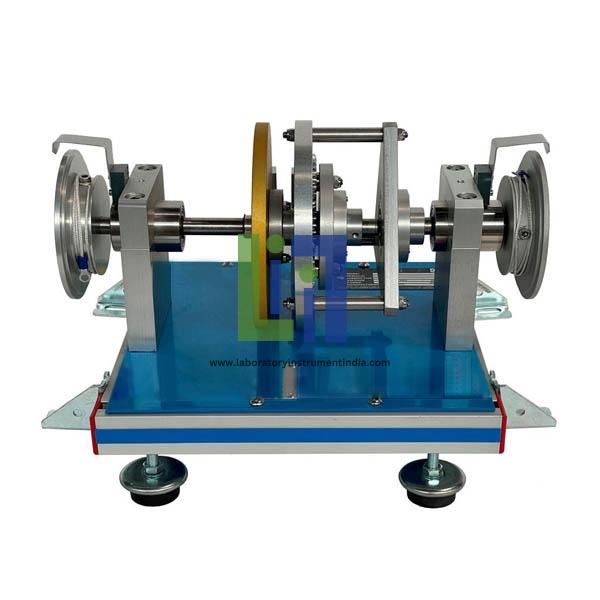
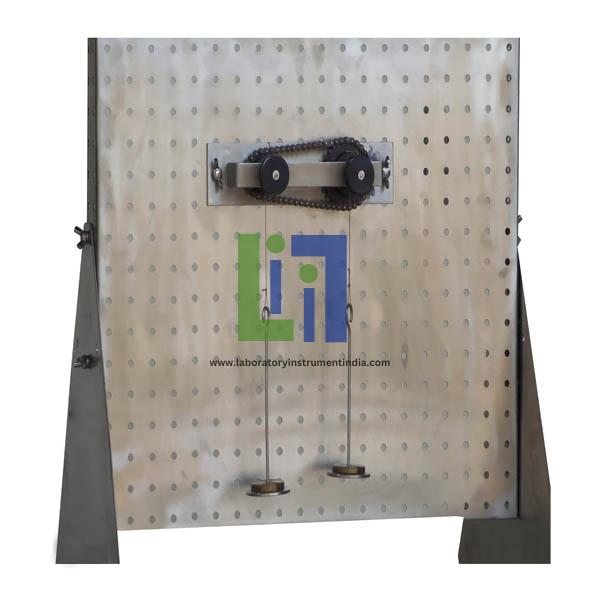
The elements are connected to each other via pivot joints. The positions of the pivot joints can be varied to adjust the crank radius, oscillation radius and coupling length. The experimental unit comprises the drive disk with the crank and coupling and the output disk with the rocker. The drive disk can be driven by the crank. The unit can be used to investigate the crank-rocker mechanism, the double rocker mechanism and the double crank. The Four-Joint Link is a four-bar pivot gear. It converts rotary motion into oscillating motion.
Features:
Conversion of rotary motion into oscillating motion.
Learning Objectives And Experiments:
Verification of the condition by varying the crank radius, oscillation radius and coupling length
Investigation of the mechanical relationships on the four-joint link
Investigation of the principle of the crank-rocker mechanism, double rocker mechanism and double crank.
Similar items like Four Joint Link Kinematic Model you may view