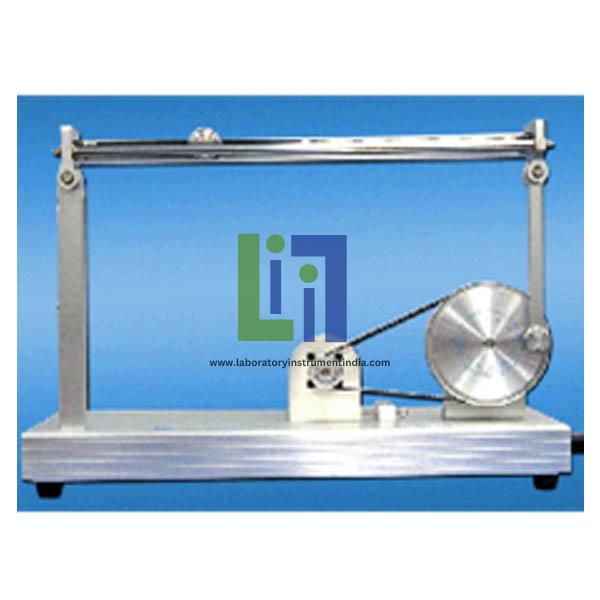
The model simulates a helicopter with horizontal and tail rotors to give pitch and yaw control. The control system must keep the helicopter stable and allow for a change in the centre of gravity. When operating near the steady state, the electromechanical system can be linearized to a six-order model. Sensors measure the yaw and pitch angles. This gives a two-input and two output system, with cross-coupling. Students use the educational manual (supplied) to help identify plant dynamics and create a control system.
The equipment includes:
The model helicopter on a stand
A protective steel cage to put around the helicopter for safety
An interface unit
A data acquisition board for your computer.
Experiments:
Direct derivation of a general mathematical model of a helicopter using System decoupling techniques, diagonalisation of system transfer matrix and state space methods.
Direct and indirect (closed-loop response analysis) methods should be used.
Lagrange equations, linearisation and simplification.
On-line identification of parameters of a linear model.
State feedback design, observer design
Stabilisation and tracking tasks formulation.
Similar items like Helicopter Model you may view