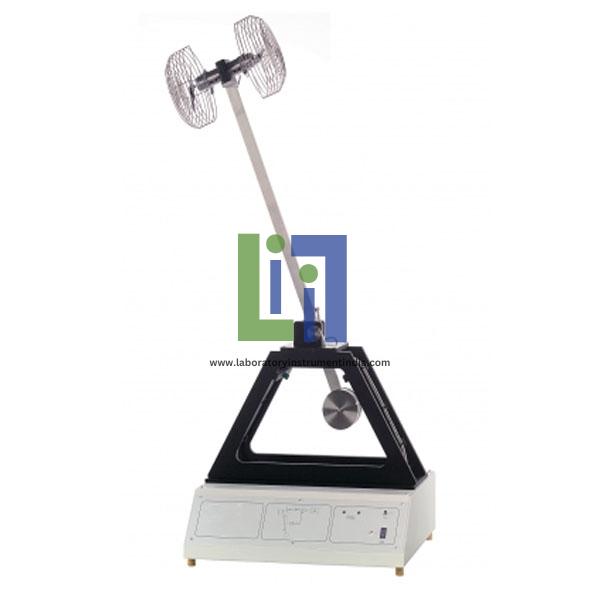
This experimental unit forms part of a series of teaching systems developed in collaboration with the Department of Automation and Information Technology at the Harz University of Applied Studies and Research. A fuzzy control will be developed and optimised for this purpose. The inclination of the pendulum is measured by a potentiometer. The unstable "inverted pendulum" system acts as a mechanical single-variable system. The upright position of the pendulum is adjusted by two independent propeller drives and should be achieved quickly and if possible without overshooting. This output value controls the actuators, two propeller drives. The sensor supplies a crisp signal to the fuzzy controller, where the signal is transformed into a fuzzy input value and inferenced before being transformed back into a crisp output value.
Design and optimise fuzzy control systems using microcontroller technology
Rotary potentiometer as pendulum inclination sensor
Part of the structured learning concept: level 2a
Inverted pendulum as mechanical single-variable system, SIMO (Single Input - Multiple Outputs)
2 independent motors for propeller drive as actuators
FSH-Shell development software for designing and optimising the fuzzy controller.
Similar items like Fuzzy Control Inverted Pendulum you may view







